在诸多数据处理工程领域中(例如:深空探测目标检测和追踪),人们需从因物理约束或昂贵装备限制下(如:射电望远镜天线降采样、深空遥感车载CCD的有限传感器)获取的不完备测量数据中检测目标。这一任务的实现可以促进诸多领域发展,其基础数学理论框架的建立具有积极意义。近几年,新疆天文台行星科学研究团组研究人员单昊采用微分几何曲线演化理论,基于压缩感知快速优化算法,进行了高度不完备测量数据中多目标边缘检测的理论研究。此项研究成果已发表在《模式识别》(Pattern Recognition, 2023, 110007)。
当前目标边缘检测方法检测器有目标的捕捉范围较小,克服噪声和干扰的能力弱,对于弱边界和模糊边界的识别能力不强等问题。针对当前现状,此项研究在优化过程中针对迭代过程的中间测量进行边缘信息的提取,将此信息反馈入下一步迭代,借此更新检测器参数。其优势在于:中间测量的有用信息得到充分利用,检测器精度提高;复几何小波变换推导的检测器实现了边缘最优估计率。实验对于强噪声和弱边界背景下的多目标进行了比较研究和统计实验。从结果展示的峰值信噪比和均方根误差等评价指标来看,方法相对于当前部分流行算法具有一定的优势。
当前,此项工作主要致力于理论基础的构建。后续,科研人员将基于当前模式识别基础数学框架进行改进,理论研究目标的形状信息,进一步发展边缘和形状的同时识别能力。应用上有两个方向:1)开展深空探测遥感数据解码阶段的多目标、多形态学特征的检测,用于小行星和天体表面的诸多科学目标;2)结合射电望远镜采样机制,开展高动态范围和大视场数据的射电源检测。
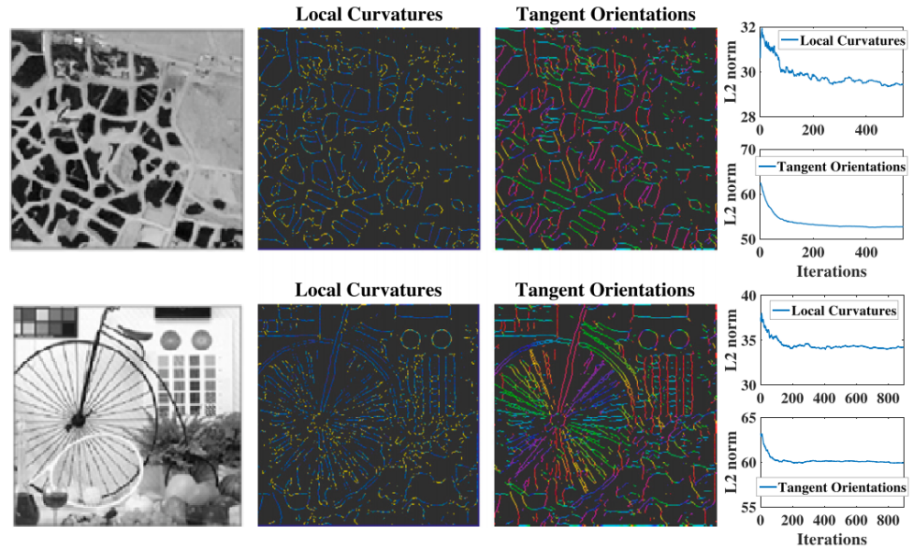
图1. 检测器对局部几何特征(曲率和切向)的提取。第二列(曲率图):暗线条表示算法收敛时接近零度的曲率。第三列(切向图):红色和绿色线段表示算法收敛时垂直和水平方向的切向。第四列:两个几何特征的收敛过程。采样为:随机下采样归一化傅立叶变换的33条径向采样线(采样率:0.1394)。
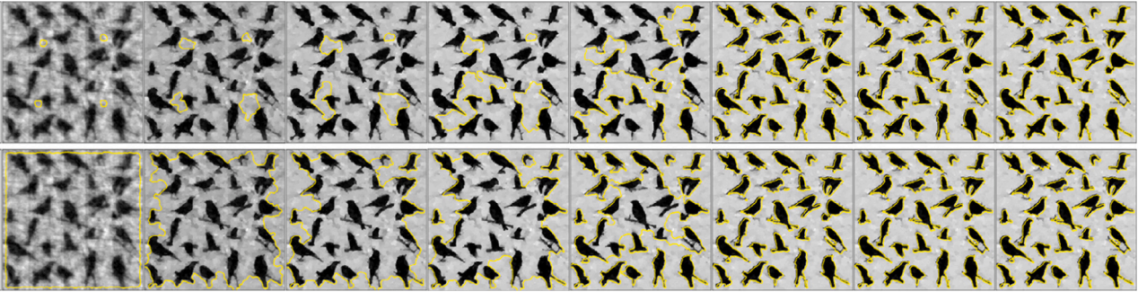
图2.多目标检测结果,第1和第2行分别表示曲线向外和向内演化。优化迭代步分别为:迭代2、100、250、400、500、800、1100和1129。采用17条径向采样线 (采样率:0.0728)。

图3. 本文方法(第1行)和泊松逆梯度法、局部化区域法、无边缘主动轮廓法、Bregman CS框架法(第2行)对弱边界追踪结果比较。
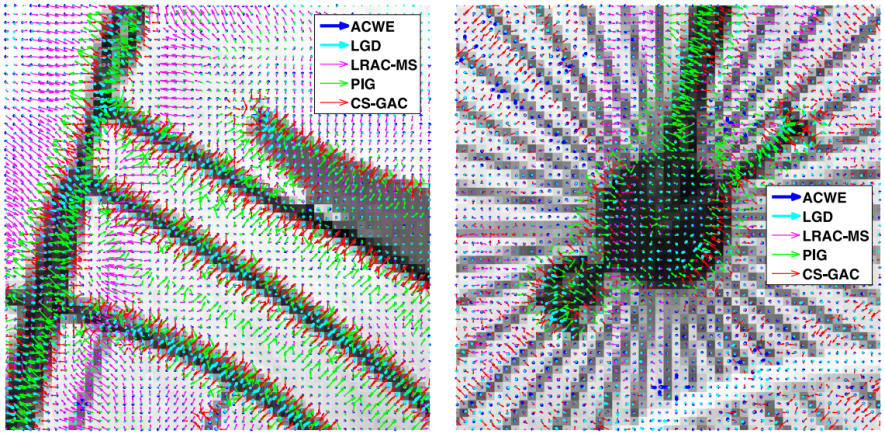
图4. 几种方法对于边缘检测的外力场比较。